| �����y�T��λ���ĽM�ɺ�ԭ��
һ�����������y�T��λ���ĽM��
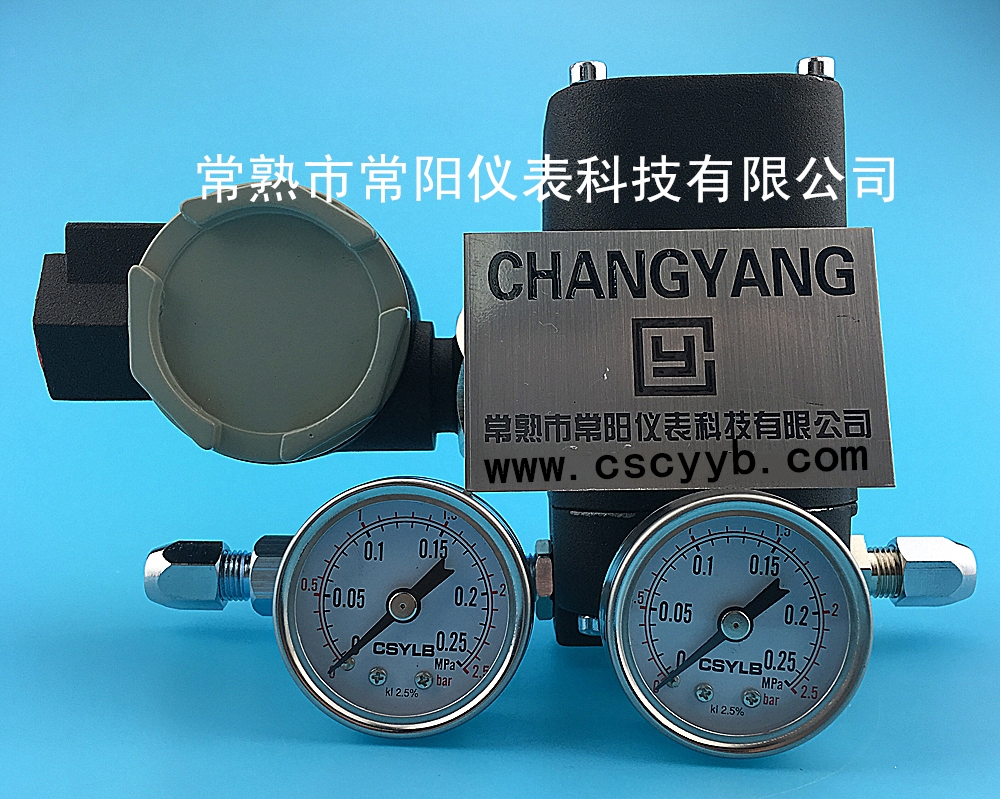
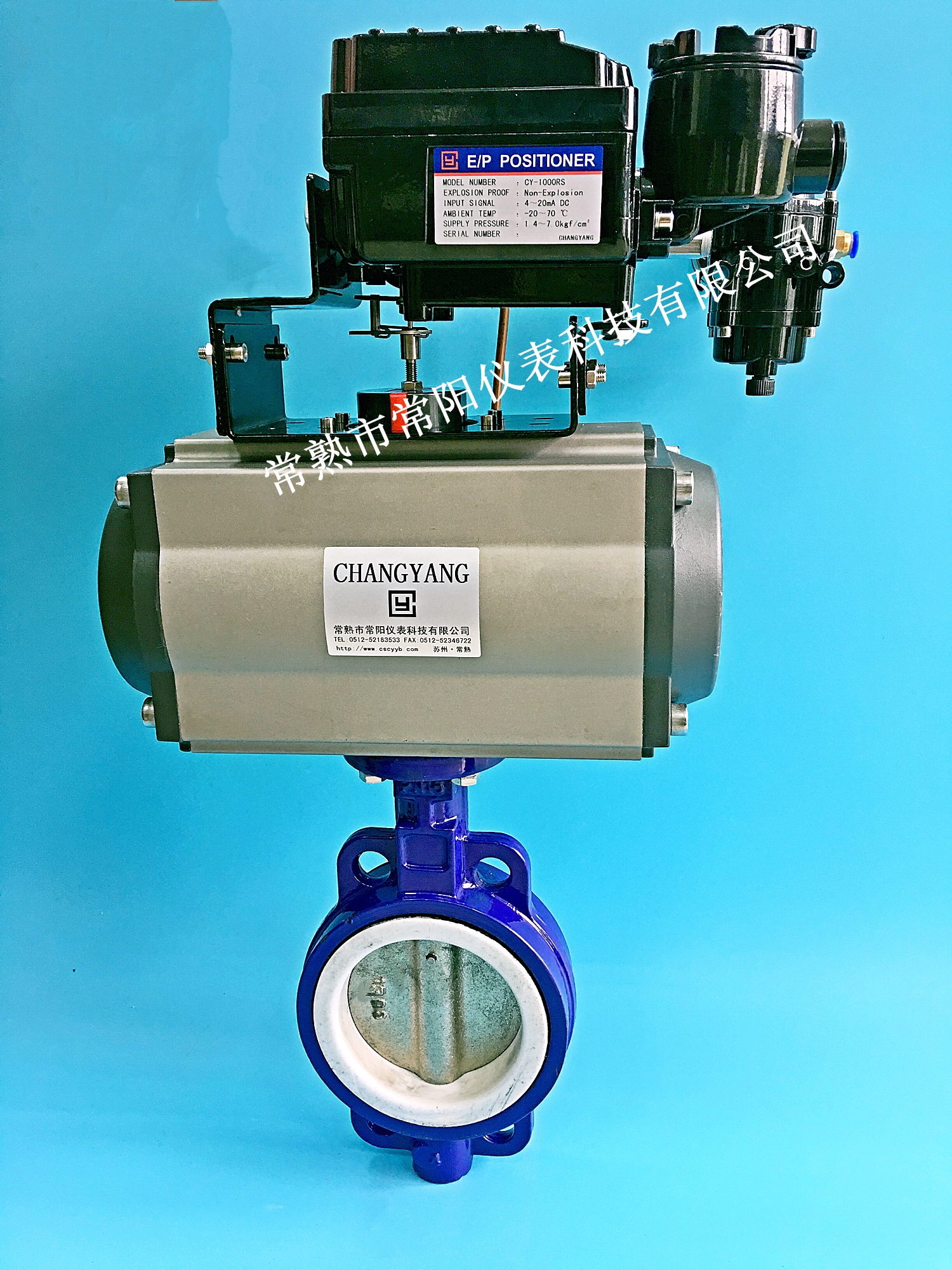
�����y�T��λ����һ�N����HARTͨ�Ņf�h���y�T��λ������������ֽM�ɣ�̎������ӿ��Ƶ�ģ������������HARTͨ��ģ�K�;͵��Ñ������_�P������/����D�Q��ģ���ĉ���y�������yλ�����������
�������� �����y�T��λ���Ĺ���ԭ��
�������ƻ�·�Ƀɾ����4��20mA��̖�������HARTģ���ͳ��ͽ��կB����4��20mA��̖�ϵĔ�����Ϣ��������F�c̎�������p����ͨ��������ģ�M����4��20mA��̖���o̎����������c�yλ�������ķ����M�б��^�����̎��������ƫ��Ĵ�С�ͷ����M�п���Ӌ�㣨һ�����ƣ����������y�l��늿�ָ��ʹ���M���_�������]��������������y��������ָ���}�_�Č��Ȍ����ښ�ӷŴ���ݔ���������������ͬ�r��ӷŴ�����ݔ���ֱ������o�ȿ��ƻ�·����ٴ��c̎�������\��Y���M�б��^�\�㣨�������ƣ����ͨ�^�ɼ�����ݔ����̖�����ЙC����������ЙC���ȿ՚≺����׃���������y�T�г�������������ƫ��ܴ�r����������y�l�������}�_��̖���ʹ��λ��ݔ��һ���B�m��̖����������ȵĸ�׃�����ЙC������̖�������y�T���ل����������S���y�T�ӽ�Ҫ���λ������������Ҫ���λ���c�y��λ�õIJ�ֵ׃С�������yݔ��һ���^С�}�����}�_��̖���������m���С���ȵĸ�׃�����ЙC������̖���������ʹ���ЙC���ӽ�������λ�õĄ���ƽ��������y�T���_Ҫ���λ�ã��M�����^���r����������y�o�}�_ݔ���������λ��ݔ�����֞���������ʹ�y�T������ijһλ�ò������

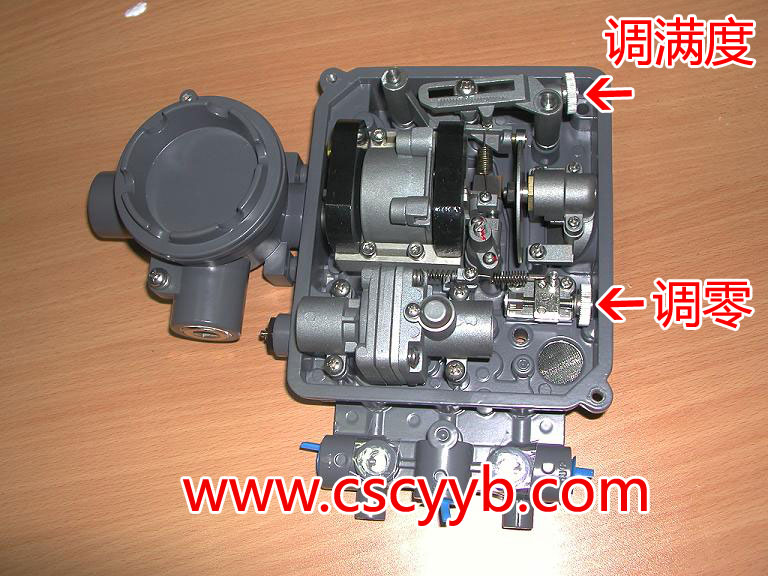
���D����ʾ��NPL410N��λ�_�P�䣩
|